
Für gewöhnlich sind Autopiloten für Motorboote eine kostspielige und technisch aufwendige Sache. Ich habe eine -finanziell- erschwingliche Lösung auf meinem Boot umgesetzt.
Die „herkömmliche“ Version bedarf einer Öffnung des Hydraulikkreises der Lenkung und Montage eines Ruderlagengebers am Tillerarm des Aussenborders. Eine elektrische Hydraulikpumpe muss mit zusätzlichen Schläuchen und einem Kompass installiert werden. Ggf. ein Netzwerk mit dem Echolot und/oder Plotter(digitale Seekarte) des Bootes. Kosten für Material liegen hier bei ca. €1.200-€1.500. Der fachmännische Einbau kostet nochmal ca. €500. Oder man macht es selbst und investiert mangels Übung viele Stunden.
Das kam aus finanziellen sowie materiellen Gründen nicht in Frage. Ich verfüge über keine hydraulische Lenkung, sondern über eine Seilzuglenkung die bei drehen des Außenborders auch das Lenkrad mitdreht. Somit war der Umsetzung eines sog. Pinnenpiloten nichts im Wege.
Der Unterschied bei einem hydraulischen Autopiloten und einem Pinnenpiloten ist das der hydraulische den Motor über die Regelung des Hydraulikflusses steuert und das Lenkrad mitdreht.
Beim Pinnenpiloten ist es so, das dieser den Motor direkt ansteuert und ihn selbst bewegt und dieser die Seilzüge an denen er hängt einfach mitzieht und somit das Lenkrad mechanisch mitgezogen wird.

Pinnenpilot ST1000+
In diesem Gerät ist ein sog. Fluxgate Kompass verbaut der feinste Änderungen des Magnetfeldes wahrnimmt und somit seine Position bestimmt. Er muss absolut waagerecht im Boot montiert werden. Die Metallschubstange vorne wird am Außenborder mit einem Auslegearm(Pinne) verbunden und hat eine Schubkraft von maximal 57Kilo. Das reicht vollkommen aus um auch große Ruderblätter krängender Segelboote schieben und ziehen zu können. Die Kraft wird über ein Spindelgetriebe im Innern des Piloten realisiert. Spindelgewinde(Trapezgewinde) finden überall dort Anwendung wo hohe Kräfte bei geringem Widerstand nötig sind(Maschinenvorschübe, Schraubstöcke usw).
Viele Segelboote haben bereits Vorrichtungen um einen solchen Tiller Pilot montieren zu können, Motorboote grundsätzlich nicht. Also musste eine Lösung her wie das Gerät an meiner Bordwand angebracht werden kann.
Meine Idee war hier meine bereits einen Winter zuvor angefertigte Downriggerhalterung zu ergänzen die bis dato noch nicht montiert war.
Das Gespräch mit dem Metaller meines Vertrauens war schnell gesucht und ein ca. 30minütiges Brainstorming mit den Brocken in der Hand verlief sehr kontrovers und äußerst zielführend. Keine 2h später hatte ich eine beeindruckende CAD Zeichnung in meinem Postfach die ich euch nicht vorenthalten möchte:
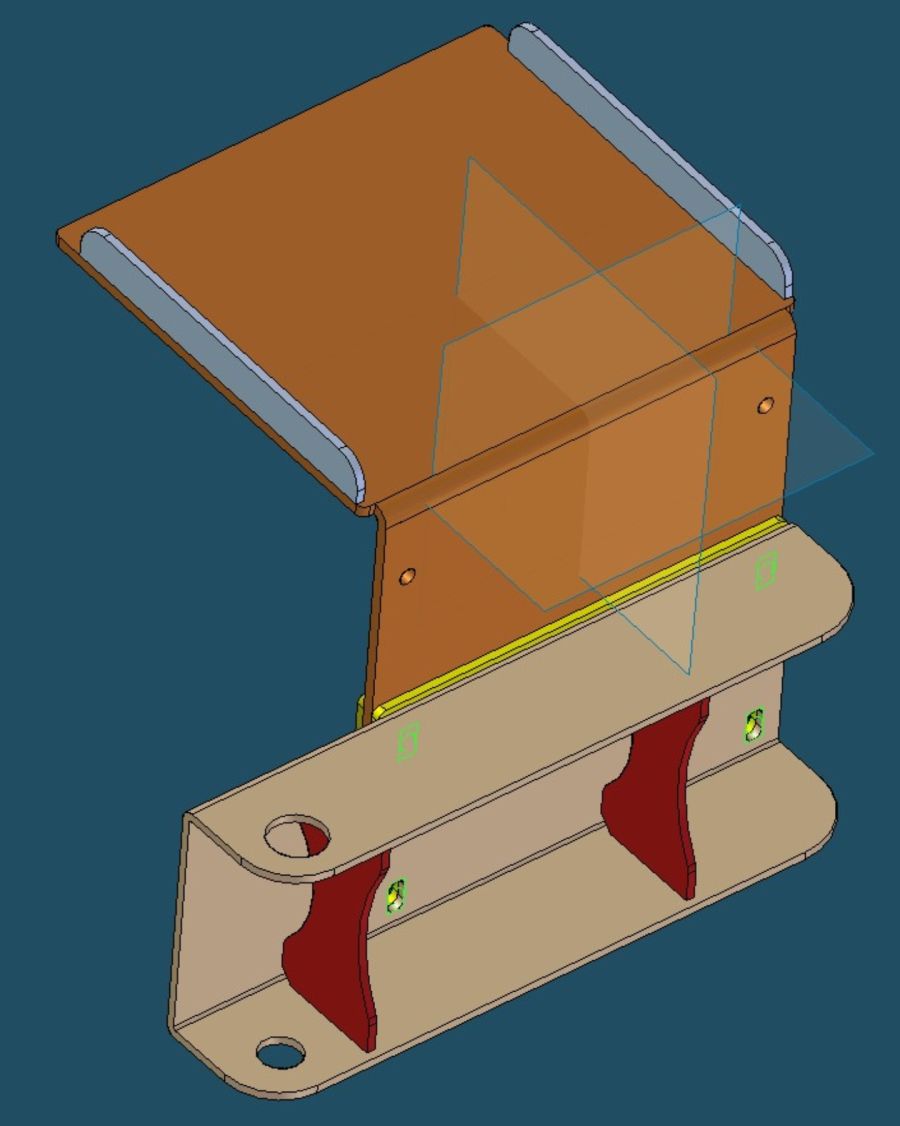
Downriggerhalterung mit Autopilotaufnahme
Der orange Winkel dient als Wandhalterung für den Downrigger wo vorn in dem gekanteten U-Blech der Tiller Pilot aufgenommen werden kann.
Die gelbe Schicht zwischen den beiden Teilen dient als Abstandhalter um die neben dem ganzen befindliche Inspektionsluke auszugleichen(Siehe übernächstes Bild)
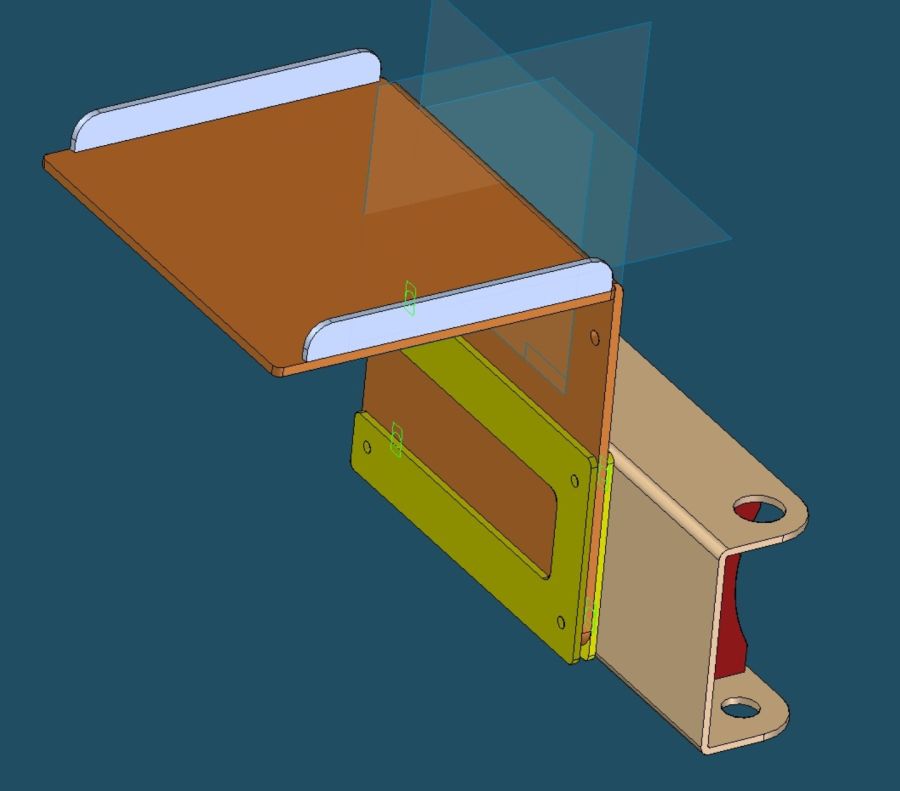
Downriggerhalterung mit Autopilotaufnahme
Das gelbe U-Blech ist der Widerhalter und wird im Innern des Bootes verbaut um ein Ausreißen der ganzen Montage zu verhindern.

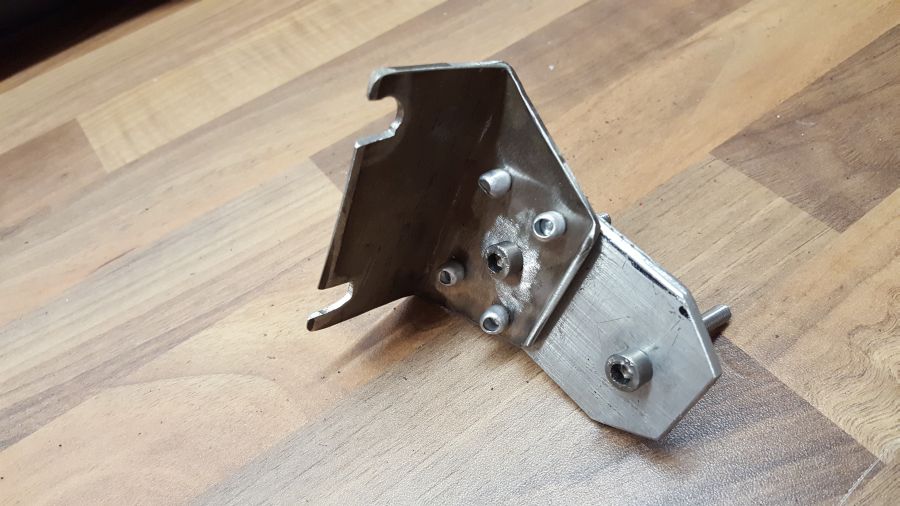
Fertig montierte Halterung – nur zum Verständnis.
Aber Step-by-Step:
Die ganze Idee kam mir, weil der Hersteller des Bootes ein hässliches Loch in die Bordwand geschnitten hat weil er der Meinung ist, das der Kraftstoffschlauch zum Motor so weit wie möglich sichtbar aus der Backskiste des Bootes herausgeführt werden sollte :-D
Das war nach Kauf des Bootes die erste Arbeit die ich gemacht habe. Das Loch war zwar mit einer Blende zugemacht worden, durch deren 2 überlappende Kunststofflippen der Schlauch rausgeführt wurde, aber das geht ja mal gar nicht :-)

furchtbar, oder?
Der Handlauf auf der Bordwand war ebenfalls zu NICHTS zu gebrauchen. Nur mit 3,5mm Blechschrauben ins GFK geschraubt… Für die Aufnahme eines Downriggers völlig unbrauchbar. Also Weg damit. Warum macht man sowas???
Übrig blieb ein hässliches Loch in der Bordwand welches ich als Eingriff nutzen wollte um das gelbe U-Blech von innen anbringen zu können. Hinterher schön mit einer Inspektionsluke verschließen. Perfekt. Sieht aus wie original…
Kreppband drüber und den nötigen Innendurchmesser der Luke angezeichnet.

Inspektionsluke von innen

abgeklebtes Loch zum Sägen bereit

Loch passend für Inspektionsluke
Nicht Kreisrund, aber an der Stelle mit über Kopf sägen ist das mit meinen Mitteln fast unmöglich :-)
Ich habe das Sägeblatt bewusst gekürzt um im Innern des Bootes keinen Schaden anzurichten. Vor dem Sägen habe ich es im Schraubstock einspannt und mit dem Hammer stumpf abgeschlagen.

gekürztes Sägeblatt
Jetzt die Inspektionsluke mit Sikaflex291i (Seewasserfest) eingesetzt und Löcher für die Schrauben gebohrt.
Hier empfiehlt es sich immer nur so groß zu bohren wie die „Seele“ der zu verwendenden Schrauben ist! Ebenso wichtig ist es, die Schrauben genau passend für die Luke zu verwenden um das beste Dichtungsergebnis zu erreichen.

Blende drauf und Winkelblech daneben
Den Winkel ansetzen und Löcher anzeichnen und ebenfalls durchbohren. Da ich ja ein Gegenhalteblech habe, habe ich diese ruhig so großzügig gebohrt wie die verwendete Schraube braucht um einfach durchgesteckt zu werden.
Eine ECHTE Prüfung war es, das Gegenhalteblech von innen anzubringen….Durch innen angebrachten Schaum konnte ich das Blech nicht einfach so vor die Löcher schieben, Schraube durch und Mutter davor sondern musste mit primitiven Mitteln von unten durch die Backskiste erst den Schaum wegschlagen. Dann der Griff durch die Luke, die von 6 nadelspitzen Schraubenenden gespickt war. 3 Schrauben und ein blutiger Handballen später war auch das geschafft. Die 4 Schraube war nicht zu schaffen. Das Blech stand durch übrig gebliebenen Schaum zuweit von der Bordwand ab und ich brauchte eine viel längere Schraube um das Blech zu erreichen. Der Örtliche Baumarkt hatte keine VA Schraube mit durchgehendem Gewinde…
Es war mittlerweile Samstag nachmittag, 16 Uhr und ich habe entnervt Schluss gemacht. Die Eiseskälte in der ich den ganzen Tag gearbeitet hatte, hat mich fertig gemacht, die Versorgungssituation ließ auch zu wünschen übrig, also entschied ich mich die Arbeiten einzustellen. Ich hasse ja nichts mehr als wegen Materialmangels aufhören zu müssen aber ich musste mich den Bedingungen geschlagen geben.
Nach einem warmen Essen und einer ausgiebigen Schlafpause auf dem Sofa ;-) waren meine Lebensgeister zurück und ich entschied mich kurzerhand um kurz vor 19Uhr noch den Weg von ca. 20km in einen hamburger Baumarkt auf mich zu nehmen um EINE! M6x60 V2A Schraube mit durchgehendem Gewinde zu kaufen damit es am folgenden Sonntag weiter gehen konnte …Was ein Irrsinn, aber was macht man nicht alles…
Am nächsten Tag hatte ich sogar Hilfe und die 4. Schraube war schnell erledigt sodaß es ans Eingemachte gehen konnte:
Der Auslegearm am Motor der mit der Schubstange des ST1000+ verbunden werden kann. Dieser Auslegearm muss genau mittig am Motor sitzen damit die Lenkachse und der Kurs wirklich stimmt. Dazu muss man das Maß von 589mm von Mitte Aufnahmebuchse(Messingbuchse in der Wandhalterung) zur Mitte Aufnahmepin am Auslegearm möglichst genau beachten.

Montagepunkt am Motor
Ich hatte mich entschieden das hier sichtbare Blech zu lösen und meine Anlenkung für den Tiller Pilot dahinter zu schieben und sie mit den vorhandenen Bolzen festzuklemmen. Ein entsprechendes Blech habe ich mir aus vorhandenen Edelstahlrohren herausgeschnitten und entsprechend hübsch geschliffen:

Winkelblech für Autopilot
Winkelblech für Autopilot von unten
Mit den offenen Langlöchern wird es einfach auf die Bolzen am Motor geschoben und von vorn festgeklemmt. Einfach und effektiv. In den Winkel habe ich Gewinde geschnitten damit die Bolzen immer fest sind damit ich den Auslegearm in sekundenschnelle drauf- und abmontieren kann. Dieser wird dann einfach mit Flügelmuttern fixiert. Zum Slippen muss das ankippen des Motors ja weiterhin gewährleistet sein.
Der Auslegearm hat am Ende noch ein Blech auf dem der Pin sitzt der mit der Schubstange des Autopiloten verbunden wird. Somit ist der Autopilot in wenigen Sekunden startklar gemacht und kann das steuern übernehmen.

Auslegearm mit Pin
Leider stellte sich beim ersten Trockentest heraus das das alles so nicht ordentlich genug funktioniert.
Die 6mm Löcher im Foto hier drüber waren zu ungenau, ein Großteil der Lenkung verschwand im Lochspiel, dazu kam eine doch beachtliche Biegung des Arms wegen der zu schweren Lenkung…
Also musste ich mich von der Idee das einfach zusammen gebaut zu lassen während des Schleppens verabschieden.
Der Tillerarm der Lenkung muss also zum fahren mit Autopilot bequem und schnell aushakbar gemacht werden damit der Motor so leicht wie möglich bewegt werden kann.
Dazu habe ich den Arm demontiert und an der Stelle wo er mit der Schubstange der Lenkung verbunden ist, die Mutter abgenommen und ein Loch durchs Gewinde gebohrt. Ab sofort wird mein Motor im Winter von einem Tillerarm gesteuert der nur mit einem Splint an der Schubstange gehalten wird. Geht völlig problemlos.

Splint im Tillerarm
Die Verkabelung habe ich mit AMP Supersealsteckern aus dem KFZ Bereich gemacht da diese mit 3 Gummilippen komplett wasserdicht sind. Teuer sind die auch nicht. Im Kabelstecker des Pinnenpiloten sind 5 Kabel untergebracht: 2x Strom +/- und 3x für die Netzwerkansteuerung des Piloten per Seatalk Verbindung. Diese 3 Kabel habe ich in der Isolation des Kabels weg gebunden da ich sie vorerst nicht brauche. Das bootsseitige Kabel direkt an die Batterie angeschlossen und in der Backskiste verlegt. Bei Bedarf wird es einfach durch den Kistendeckel herausgeführt und mit dem Pilotenkabel verbunden. Die Stecker sind richtungsgebunden, eine Verpolung gibts also nicht.
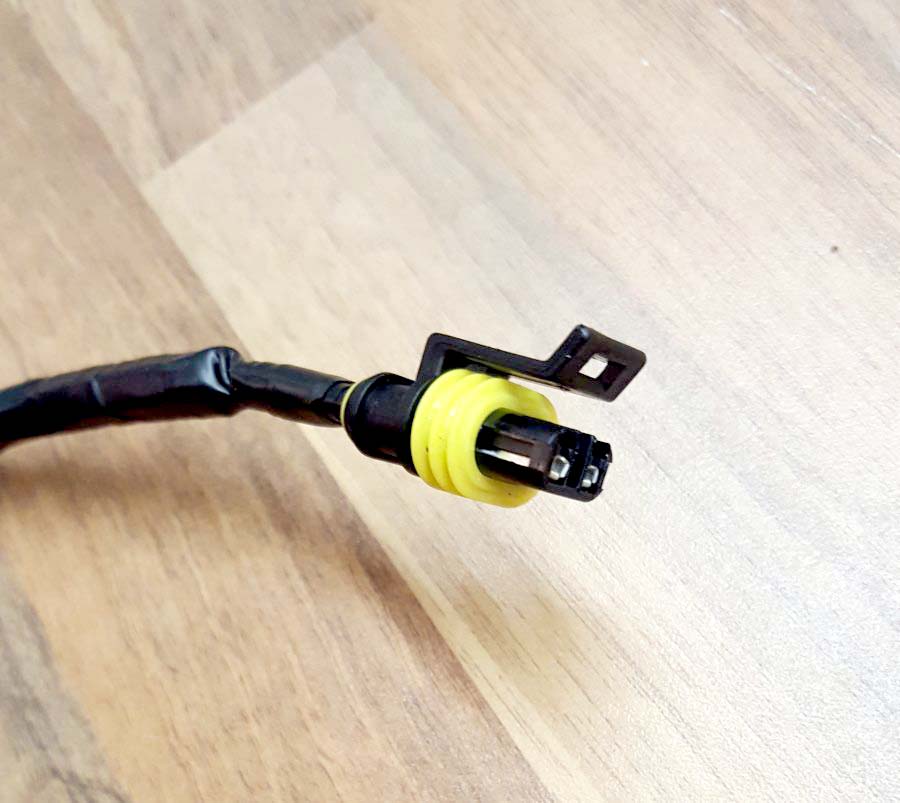
AMP Supersealstecker
Der erste Funktionstest lief hervorragend!
Das Boot hält seinen Kurs ruhig und verlässlich. Allerdings sollte man seinen Pinnenpiloten auf Kurse der nördlichen Halbkugel eingestellt haben!
Diese Einstellung findet sich im Menü unter Punkt 10 und der Wert sollte hier auf 1 gesetzt werden. Damit läuft der ST1000+ erheblich ruhiger und muss nicht soviel hin und her rödeln :-)
Ein Wehrmutstropfen ist allerdings noch zu beklagen:
Ich habe einen Fehler gemacht beim ersten Einsatz des Pinnenpiloten:
Ich habe ihn demontiert und nicht von Autokurs auf Standby geschaltet. Habe dann die Steuerung wieder eingehängt und eine größere Strecke in der Bucht zurück gelegt.
Dabei wollte der AP immer wieder seinen Kurs korrigieren und ist mit aller Kraft in seine ausgefahrene Endstellung gefahren wo er sich komplett festgesetzt hat und dann für den Rest des Tages ausgestiegen ist. Nicht mehr nutzbar!
Dabei ist der Steuer IC des AP´s durchgebrannt. Folge: Reparatur in England nötig, die so teuer war wie der gebrauchte AP selber!!!
Das darf also nicht passieren. Wenn man den Kurs des Bootes an der Lenkung selbst in die Hand nehmen will, UNBEDINGT die Autopilotfunktion am Pinnenpiloten abschalten. Sonst riskiert ihr verschlissene Anschlaggummis und einen festgesetzten ST1000+ der nicht mehr arbeitet.
Update Sommer 2018: Mittlerweile weiß ich auch das die nicht montierte Sicherung in der Plus Leitung der Grund für die hohe Stromaufnahme war und dadurch der Steuer IC durchgebrannt ist… Eigentlich ist eine Sicherung in der +Leitung obligatorisch….Eigentlich…. :-)
Der Nutzen den dieser Autopilot bringt ist gewaltig und das Schleppen vom Kleinboot mit mehr als 4 Ruten gestaltet sich mit dieser Errungenschaft sehr sehr viel leichter!
Hier noch 2 Impressionen des Tages:

Vorgespannte Downriggerrute

Baltic-Fisher mit gutem Dorsch
Update November 2018:
Im April 2018 hatte ich die Gelegenheit einen günstigen 30PS Mercury Einspritzer zu erstehen. Damit musste der Auslegerarm für den Autopiloten natürlich neu adaptiert werden und diesmal war klar das die ganze Montage deutlich massiver ausfallen sollte, damit ich die Lenkung nicht mehr aushaken muss, sondern der Pinnenpilot das Lenkrad mitzieht/drückt. Also nahm ich Kontakt zu einem bekannten auf, der das gleiche bei sich am 70ps Suzuki selbstgebaut hatte. Hingefahren und an einem Freitagnachmittag während meines Sommerurlaubes 2018 entstand ein komplett neuer Arm der trennbar war, damit ich auch beim slippen vernünftig trimmen kann.


Der halbe Arm bleibt immer dran, nach dem slippen wird lediglich die andere Hälfte montiert und der ST1000+ kann montiert werden.
Viel Spaß beim nachbauen.
Euer Baltic-Fisher
Olli